We have chosen to build a solar-powered unmanned aerial vehicle. As our abstract states in our proposal,
The problem of long-endurance flight has yet to be adequately solved with unmanned aerial vehicles (UAVs). Conventional powertrains are typically disadvantaged by limited capacities for non-renewable fuels, but in theory a renewable energy source would permit self-sustaining flight. However, most formal research to date concentrates on developing aircraft with immense wingspans, while overlooking miniature UAVs due to difficulties with effective downscaling. This team intends to bridge that gap by demonstrating multiple-day flight using an autonomous solar-powered UAV with a wingspan of 3m or less.
Meticulous power-saving techniques make continuous flight practical. Minimizing the mass of the airplane decreases the load on the motor, saving energy. Further efficiency relies on an embedded system that, with minimal overhead, can dynamically tune aircraft behavior for strategic power conservation, such as gliding, disabling non-critical electronics, and adjusting altitude. The objective for the UAV is to maintain a permanent station in the air without depending on persistent human direction.
Many applications would benefit from an inexpensive, autonomous, permanently airborne platform: weather tracking, emergency response communications, and high-altitude scientific research. Its smaller size, lower cost, and fewer maintenance requirements will allow the quick deployment of application-specialized drones in a sky-based network. (hide)
After our proposal was accepted by the Cornell Cup USA, we purchased parts and initiated work on the plane. After a few months of hard work, we've motorized a wooden plane for testing, and we've gotten an elementary autopilot operational. We've also got the workings of a solar charging circuit. A video of a test flight (without autonomy) is on the right:
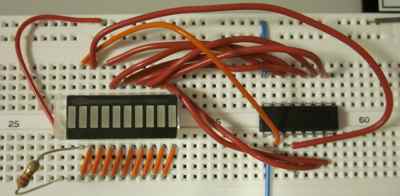
Early prototyping began with a simple, but robust microcontroller on a breadboard. We were able to go from zero to blinking LED in only one evening.
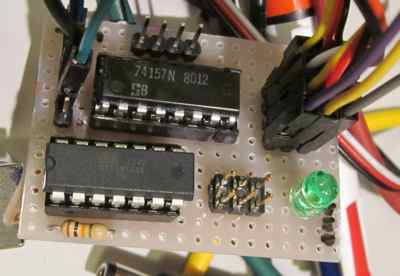 Following that, initial devices began to come together, such as the radio
control multiplexer, which allows the human operator to regain control of
the airplane at any time.
Following that, initial devices began to come together, such as the radio
control multiplexer, which allows the human operator to regain control of
the airplane at any time.
Once these critical components are completed, we can put it all together and hope for the best.